Marin Kobilarov, Johns Hopkins Whiting School of Engineering
Greg Hager, Johns Hopkins Whiting School of Engineering
Aurora Schmidt, Johns Hopkins Applied Physics Laboratory
Advances in image recognition and reinforcement learning are changing the way modern autonomous systems perceive, decide, and control. These systems learn and adapt to evolving tasks and environments not anticipated by human designers. But current approaches are vulnerable to small changes in the environment and do not guarantee reliable operations in complex environments. Using testbeds for unmanned vehicles and robot-assisted eye surgery for demonstration and validation, this project aims to assure autonomous systems by pioneering an architecture that combines physics-based control, reliability assessment of machine perception algorithms, and formal methods for verifying the safety and performance of system decisions. Through this work, autonomous systems will learn and adapt to increasingly complex situations while providing guarantees of safe performance. This research will advance innovative new processes and produce verification and validation that is adaptable and scalable to modern AI algorithms for autonomous systems.
This project promises to deliver revolutionary methods for operating high-confidence assured autonomous systems that are currently infeasible using existing methods.
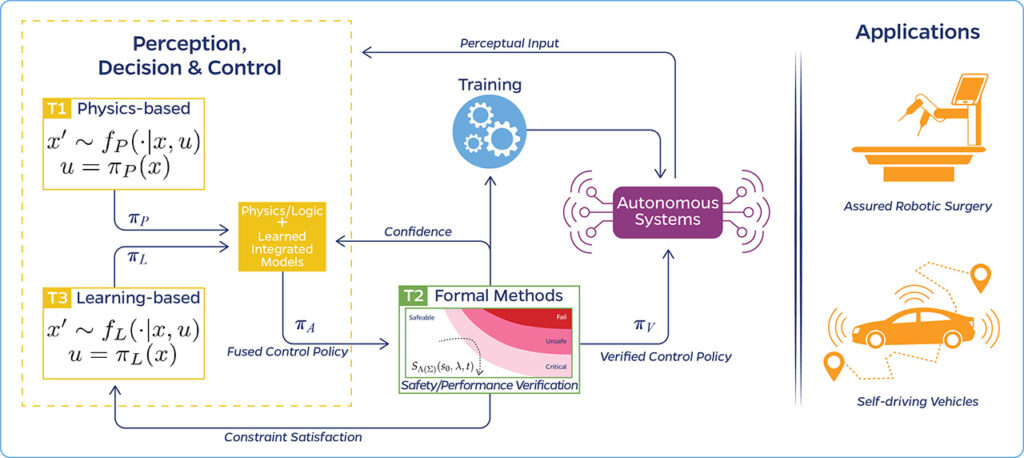
Figure 1: High-confidence autonomy architecture unifying physics-based modeling, machine learning, and formal methods.